Belgian geologists test mining robots

Geologists from the Institute of Natural Sciences went underground in the old mine of Mežica, Slovenia. For a week, they tested the sensors of their bio-inspired mining robot, which can detect thin veins of metal in the rock. ‘A technological revolution is underway in the mining sector.’
The miners of the future
I am meeting with Christian Burlet, a geologist at the Institute of Natural Sciences. He wants to tell me about a European mining project he’s working on with fellow geologist Giorgia Stasi. When I think of mining, words like "dirty," "heavy," "unhealthy," and "long ago" come to mind. I don't really understand what Christian could have with that - I know him as an inventor, a technological genius who invents new machines with a 3D printer and a tangle of electrical wires, that could go to Mars or the deep sea. I share my thoughts with him. "You're not alone," he reassures me. "Most people have a wrong idea of what mining is today. It's a sector that is undergoing a technological revolution. And that's what we want to contribute to, the mine of the future."
We want to develop robots that can autonomously dig tunnels, selectively extract interesting ores along the way, and bring them to the surface.
- Christian Burlet, Institute of Natural Sciences -
Mobile phones, laptops, electric cars, wind turbines, solar panels all contain metals that need to be mined. "Currently, we import the vast majority of our critical raw materials from outside Europe. But not because we don't have them here. People don't realize it, but there's a whole stock of metals right under our feet!" Christian Burlet continues passionately. “Some of them are still lying in small, flooded, abandoned mines, that are not economically viable to operate with current methods." So, you have to find a way to precisely extract the ores, with as little waste as possible, in safe conditions and with minimal impact on the environment. We are not ready for that yet, but projects like ours are trying to pave the way." And what does the mine of the future look like? "Our project is called ROBOMINERS, and that pretty much sums it up. We want to develop robots that can autonomously dig tunnels, select interesting ores along the way, and then bring them to the surface. Our mine would be swarming with little robots, and no humans would have to go underground anymore."

No passage
Two weeks later, the time has come. We head to Slovenia for the final major step of the project: testing the sensors in a real mine. Christian Burlet and Giorgia Stasi are already there, and they pick us up at Ljubljana Airport. "It's really exciting," Giorgia starts as she helps load our luggage into the trunk. "So far, we have only tested our instruments in the lab. The question is whether they can withstand the challenging conditions of the mine." We continue our journey to Mežica (pronounced: medjitsa), a former mining village where lead has been mined for many centuries. A little too direct, I ask if we really have to come all the way here - don't we have old mines in Belgium too? Stasi seems unfazed. "We focus on small veins with highly concentrated ores, which are difficult to extract. Belgium is full of them, but the mines are too unstable or completely flooded. Here in Mežica, the mine is even accessible to tourists!" "There are toilets and a kettle for tea!" Burlet adds enthusiastically.
We drive through the cornfields towards the Austrian border, which we have to cross twice—in, out - no other option with a mountain range right on the border. But right where we are supposed to enter the mountain pass, we encounter a white and red striped barrier with flashing lights. Ni prehoda, no passage. What now? This is the only road. Behind us, a few more cars stop, including - we discover after a chat - the mayor of Mežica. He explains that due to the heavy floods last summer, the trees along the road have become unstable, and a few likely fell on it again. After some phone calls, he shouts, "They are coming to open for us!" We can go through, but quickly. In convoy, we enter the mountain pass along winding mountain roads, indeed flanked by half-cut tree trunks. Two hours later than expected, we arrive at the goat farm where we will stay for the next week after the long days without sunlight underground. What an idyllic place; what a contrast with the high-tech gadgets our geologists will test in the coming days.


Shooting lasers
The mine is located beneath Peca (pronounced: petsa), a mountain that is part of the Karawanken, a mountain range in the eastern Alps of Austria and Slovenia. It is world-famous for its rich deposits of wulfenite, a yellow to orange-red lead-containing mineral. Most natural history museums have at least one specimen from Mežica in their collection. Lead and zinc have been mined here since the fifteenth century, and possibly even in Roman times. Today, you can only go kayaking and mountain biking underground - the mine has been inactive since 1994. But going inside still works in exactly the same way as 50 years ago: in a wooden train. Train driver Miran Prost is a former miner himself and now brings tourists and this week also scientists in and out. It's a hellish journey of fifteen long minutes in a tiny wagon with a closed roof against falling stones, in pitch darkness. Time for some reflection, you might think, or a chat with your neighbour. No way: the rattling is deafening. Once arrived, we find ourselves under six hundred meters of stone. "Luckily, it's hard!" Prost jokes. I tighten the strap of my helmet a bit more just to be sure.


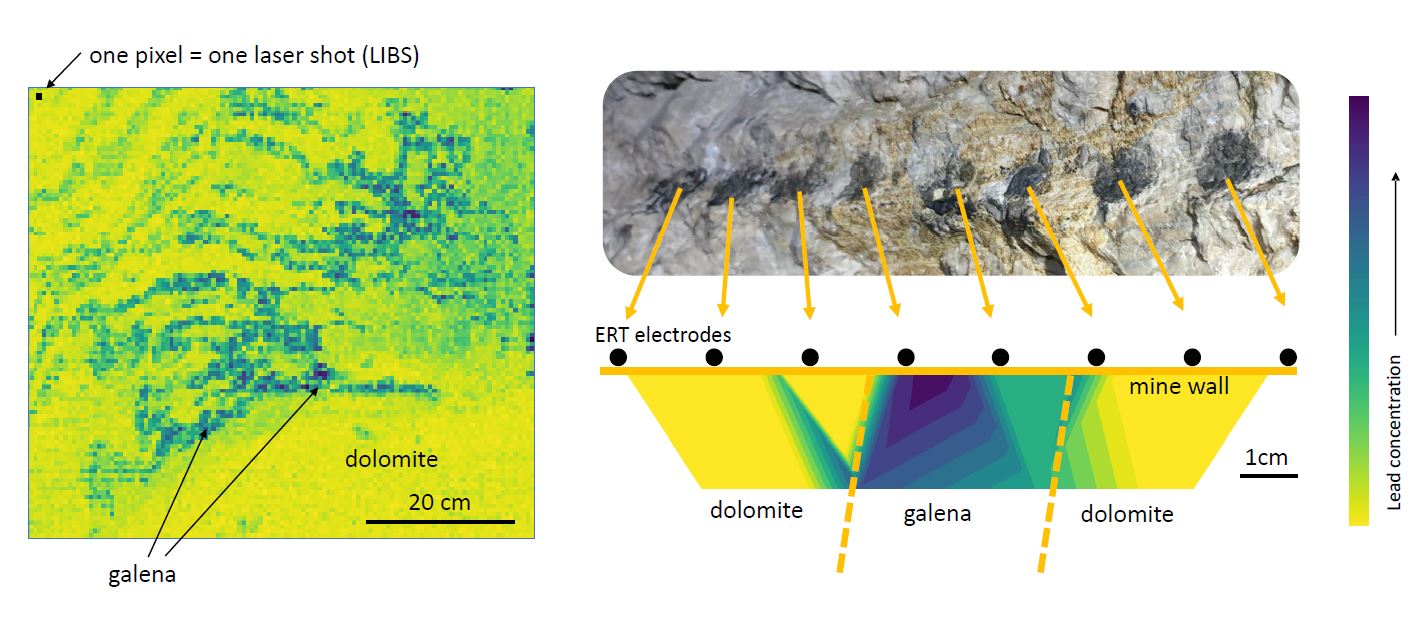
Burlet and Stasi start installing their sensors. "We are responsible for the eyes and ears of the robot," Giorgia explains. "I work with a robotic arm, on which we attached a module that allows us to see what is behind the rock wall," she says, holding a PlayStation game console. It is used to control the arm and bring the fingers in contact with the rock. “I never thought gamer skills would come in handy for a geologist!" After ten minutes of intense concentration, she manages to press the eight fingers firmly against the wall. A sigh of relief. Good contact is essential because the next step is to send electricity through it and measure the response with the ERT module, where ERT stands for Electrical Resistivity Tomography. "Each mineral has its characteristic resistivity, indicating how well it resists electrical current. The rock here is made of dolomite, with black and yellow veins: galena and sphalerite. Galena contains lead, and sphalerite contains zinc. By sending electricity through the rock wall, we can map where each mineral is located and how the veins continue deeper in the rock." Like that, the robot can gather information to decide in which direction it should continue digging. "Now we have to wait for half an hour while the ERT machine does its thing. I'll make some tea to warm up!"
It is indeed cold here underground, around ten degrees. Some movement can work wonders too, so I decide to go look for Christian, who is somewhere working with his laser. With my headlamp to the strongest setting I start descending the iron ladder. My steps echo in the gigantic shaft, which seems to go on endlessly. The warning of train conductor Miran is still fresh in my mind: "Be careful not to get lost. There are a thousand kilometres of tunnels here on nineteen levels. After more than forty years I can find my way back, but you won’t." Just as I’m starting to wonder if I would be better off returning and getting reinforcement, I hear a reassuring sound in the distance: tatatatata-miiiiiiiiii-tatatatatata-miiiiiiiiiii - the laser! Small passage to the left, duck for a moment and watch out for the deep abyss - what could be down there? - turn left again, and in the distance I can see him moving back and forth: a large green creature on thin legs.
In the mine of the future, it will be bustling with robots. There will be no need for humans to go underground anymore.
- Christian Burlet, Institute of Natural Sciences -
Burlet looks satisfied. "Here, take these goggles!" he says. It feels absurd to wear sunglasses with a headlamp on, but it's not for show. "The laser briefly heats up a tiny spot on the surface to a temperature in excess of 10,000°C. It can be very harmful to the eyes," he explains while tightening a tiny screw. The sensor Burlet has developed, nickname The Frog, is based on a technique called LIBS: Laser-Induced Breakdown Spectroscopy. "We shoot a laser at the rock wall, and at that specific spot, plasma is formed: a kind of soup of electrons, neutrons, and protons that emits a flash of light. You capture that light in the instrument, which in return gives you the chemical composition of that specific point." I push my goggles a bit further on my nose; I would rather not see my eyes turn into plasma soup. "By scanning the rock wall point by point, line by line, we create a kind of map of the chemical composition of the surface, including the critical raw materials. This way, we, and the robot, get an extremely detailed picture of what's in front of us."


Greedy worms
Suddenly, it's time to return. Time seems to run differently underground—it felt like an hour and at the same time like a whole week. After the train ride we arrive back to the real world, where the sun has just set. We haven't seen her today. Appointment with the team in the only restaurant in the area and our canteen for the week. There you can feel we are in the Alps - traditional wooden furniture, lace curtains, and large bowls of wild mushroom soup. I start chatting with Milan Milanov, one of the developers, and ask him what he does. "We deal with the philosophical side, the consciousness of the robot. Who am I? What am I doing? How can I improve?" The confusion must be visible on my face because he quickly continues, "Wait, I'll just show you." On the screen of his phone, a winding network of tunnels develops. "This is our Greedy algorithm at work," he proudly tells me. "When the robot makes decisions according to this algorithm, it behaves like a hungry animal. As much ore as possible and as little waste as possible. And that's exactly what we want." It looks like a network of tunnels in an ant colony. "Exactly! We drew inspiration from various burrowing animals, both for the design of the robot and for its behavior. Why not take advantage of millions of years of evolution? As my team leader always says: we can learn from worms!"

Six days later, the campaign comes to an end. With five kilograms of goat cheese and three litres of honey in the trunk, we drive back to the airport. The mood is good, the sensors have passed the test in the mine with flying colors. "Our instruments worked, there were no major problems. The whole team was also extremely helpful. It couldn't have gone better." Burlet looks through the window at the mountains getting smaller. "A motley crew of geologists, roboticists, engineers, and developers. Only by uniting forces can you go where no one has ever been."





